| Anbieter und Produkt |
|---|
| Anbieter: |  National Instruments Germany GmbH National Instruments Germany GmbH |
| Produktfamilie: | Bildverarbeitungs-Plattform NI PCI/PXI-VDM |
| Produktvariante: | Vision-Plattform NI PCI/PXI - VDM |
| Applikationsbeispiel-Verschlagwortung |
|---|
| Anwendung: | Objekterkennung und Positionsbestimmung Objekt-Positionsbestimmung 2,5D-Positionsbestimmung |
| Erzeugnis: | Automobil-Motorenteile Zylinderköpfe |
| Branche: | Fahrzeugbau Automobilzulieferindustrie |
| Applikationsbeschreibung |
|---|
| Aufgabenstellung: |
|---|
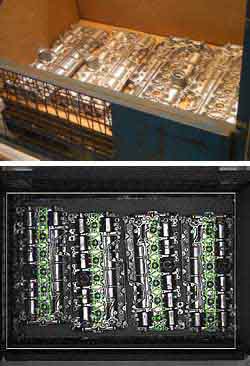
In der Motorenfertigung eines Automobilzulieferers werden gegossene Zylinderköpfe in Gitterboxpaletten angeliefert, die manuell entladen und der weiteren Bearbeitung zugeführt werden. Die Bauteile in der Gitterbox sind in sieben Lagen zu jeweils vier Zylinderköpfen aufgestapelt und nur durch Kartoneinlagen voneinander getrennt, so dass die Zylinderköpfe nicht fixiert sind und hohe Toleranzen bezüglich Lage und Verdrehung aufweisen.
Im Zuge der Prozessautomatisierung soll die Entnahme zukünftig durch einen Roboter übernommen werden, was eine automatische, präzise Positionserkennung der Zylinderköpfe mit einschließt. Die Verwendung mehrerer Lasertaster zur Lageerkennung scheiterte, so dass die Firma CTMV Consulting Team Machine Vision als Systemanbieter optischer Inspektionssysteme beauftragt wurde, eine entsprechende Lösung zur Roboterführung zu entwickeln. |
| Realisierung: |
|---|
Es wird eine Bildverarbeitungslösung auf Basis der Vision-Plattform NI PCI/PXI-VDM von National Instruments realisiert. Über dem Palettenplatz ist mittig eine IEEE-1394 (Firewire)-Kamera mit Beleuchtungseinheiten installiert. Nach einem Startsignal vom Roboter wird ein Bild der gesamten Lage aufgenommen und die exakten Positionen der Zylinderköpfe über einen speziellen Suchalgorithmus ermittelt. Ein Mustervergleich (Pattern Matching), kombiniert mit einem spezifischen Kalmanfilter, sucht jeweils die sechs signifikantesten Bohrlöcher auf den Zylinderköpfen, die zueinander in einem definierten festen Abstand stehen. Im Anschluss folgt eine Feinvermessung, um alle Mittelpunkte der Löcher, aus denen letztlich der Schwerpunkt des gesamten Bauteils errechnet wird, präzise zu bestimmen. Unter Berücksichtigung der Position des Öleinlassstutzens wird abschließend der Drehwinkel des Bauteils bezogen zum Mittelpunkt errechnet.
Die Ergebnisse stehen zunächst als Pixelkoordinaten zur Verfügung und werden mit Hilfe der in der Vision-Plattform NI PCI/PXI-VDM zur Verfügung stehenden Kalibriermethoden in das Koordinatensystem des Roboters überführt, der auf diese Weise präzise Positionsdaten mit einer Genauigkeit von 0,2 mm erhält und die Bauteile greifen und entnehmen kann.
Ist die Lage leer, wird diese von einem separaten X-Y-Linearsystem mit Sauggreifer entnommen und der beschriebene Vorgang wiederholt sich mit der nächsten Lage. Die unterschiedlichen Höhen der Bauteillagen konnten bereits bei der Inbetriebnahme in die Kalibrierung mit einbezogen werden, zusätzliche kleinere Höhentoleranzen sind in der Praxis vernachlässigbar. Bei fehlerhaft eingelegten Bauteilen wird die Entladung der Box automatisch gestoppt.
Die Basis für das Bildverarbeitungssystem bildet ein Standard-PC, ausgestattet mit einem IEEE-1394 Host-Adapter (NI PCI-8252) zum Anschluss von IIDC-compliant FireWire®-Kameras sowie einer digitalen IO-Schnittstellenkarte (NI PCI-6515) zur Kommunikation mit der Anlagensteuerung. Die Positionsdaten werden zwischen BV-System und Roboter über die serielle Schnittstelle ausgetauscht. Die Software wurde mit Hilfe von LabVIEW und den National Instruments Bildverarbeitungsbibliotheken NI Vision Development Module entwickelt. |
| Kundennutzen: |
|---|
| Durch die Benutzung der Vision-Plattform NI PCI/PXI-VDM konnte durch eine freie geeignete Kombination von Hardwarekomponenten und über die in der Software verfügbaren Standardfunktionen in Verbindung mit eigenen spezifischen Auswertealgorithmen in kurzer Zeit eine Lösung gefunden werden, die im Dreischichtbetrieb zuverlässig arbeitet. Die monotone und anstrengende manuelle Entladung konnte erfolgreich automatisiert werden. |