| Anbieter und Produkt |
|---|
| Anbieter: |  Panasonic Electric Works Europe AG Panasonic Electric Works Europe AG |
| Produktfamilie: | Mehrzweck-Bildverarbeitungssystem PC-Imagechecker P400 |
| Produktvariante: | Mehrzweck-Bildverarbeitungssystem PC-Imagechecker P400 |
| Applikationsbeispiel-Verschlagwortung |
|---|
| Anwendung: | Objekterkennung und Positionsbestimmung Objekt-Positionsbestimmung 2D-Positionsbestimmung |
| Erzeugnis: | Metallteile Stanzteile, Schüttgut |
| Branche: | Fahrzeugbau Automobilzulieferindustrie |
| Applikationsbeschreibung |
|---|
| Aufgabenstellung: |
|---|
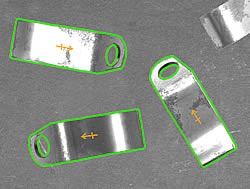
| Bei der automatischen Montage eines Winkelträgers für die Automobilindustrie müssen verschiedene Blechstanzteile von einem Roboter zusammengefügt und anschließend verschweißt werden. Eines dieser Teile wird dabei auf einem Transportband vereinzelt aber ungeordnet zugeführt. Von diesem muss der Roboter das Teil greifen und in die Schweißvorrichtung einlegen. Für diesen Vorgang muss ein Bildverarbeitungssystem gefunden werden das automatisch die Position der Metallteile erkennt und dadurch der Pick-and-Place Vorgang des Roboters gesteuert werden kann. Es kommt erschwerend hinzu, daß die Metallwinkel abhängig von der Lage deutliche Reflexionen, sowie eine rostige Oberfläche und Transportspuren aufweisen können. |
| Realisierung: |
|---|
| Mit dem PC-basierten Mehrzweck-Bildverarbeitungssystem P400 von Matsushita Electric Works Deutschland GmbH konnte die Aufgabe zur Roboterpositionssteuerung realisiert werden. Die Kamera wurde dabei in den Roboterkopf integriert. Aus Platzgründen muss die Zuführstrecke seitlich beleuchtet werden. Durch eine Lichtschranke erkennt die Zuführeinrichtung aus Linearvibrationsförderer und Förderband die Teile und stoppt den Vorschub des Bandes im Handhabungsbereich des Roboters. Der Roboter fährt mit der Kamera über das Band und die Aufnahme wird ausgelöst. Innerhalb von 100 ms inklusive Bildaufnahme sind die Positionsdaten des Winkels ermittelt und werden anschließend über eine serielle Schnittstelle an den Roboter übermittelt. Einzelne Teile aus einer Anhäufung von mehreren ineinanderliegenden Teile können durch den Roboter nicht gegriffen werden. Diese Teile werden von dem Band in einen Umlaufbehälter weitergefördert. Wegen der starken Reflexionen durch die seitliche Beleuchtung und der Schwankungen in der Oberflächenbeschaffenheit wird die Auswertung mittels Konturenvergleich realisiert. Anhand hinterlegter Referenzmodelle kann die Position unabhängig von der Lage und Oberflächenbeschaffenheit bestimmt werden. |
| Kundennutzen: |
|---|
| Durch die vielfältigen Auswertemöglichkeiten kann das PC-basierte Bildverarbeitungssystem auch bei ungünstigen Randbedingungen durch die entsprechend Auswahl von Bildverarbeitungstools optimal auf die Aufgabe eingestellt werden. Anspruchsvolle Applikationen sind dadurch mit einer hohen Betriebssicherheit realisierbar. |