High Speed Pick & Place Adept Quattro s650H/800H
|
| Produktfamilien-Verschlagwortung |
|---|
| |
| Funktionsprinzip |
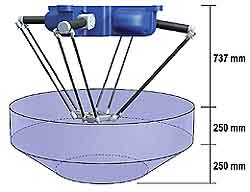
| Die Arme der Roboterkinematik sind in einem Grundrahmen aus Aluminiumguss gelagert, der hängend montiert wird. In den Grundrahmen sind die vier Antriebsmotoren der Arme sowie die Leistungsverstärker integriert. Die Arme bestehen aus einem gelenkig miteinander verbundenen Ober- und Unterarm. Der kürzere Oberarm wird mit einem Servomotor über ein Hochleistungsgetriebe angetrieben und ist in einem Winkel von -51° bis +123 schwenkbar. Der Oberarm ist durch Präzisionskugellager mit zwei parallel geführten Unterarmen verbunden, die mit zwei weiteren Kugellagern die Greiferplattform tragen und in einem Winkel von +/- 60° beweglich sind. Die Greiferplattform ist aus vier Hebeln aufgebaut, die ein Gelenkviereck bilden und über einen Zahnrad und einen Zahnriemen die Greiferachse antreiben. Diese Konstruktion ermöglicht eine Drehung der Greiferachse um maximal 180°. Durch die unterschiedliche Bewegung der vier Arme kann die Kinematik eine beliebige Bewegung der Greiferplattform in der Z-Achse von 500 mm in einem Radius von max. 1600 mm durchführen sowie die Greiferachse um 180° drehen. Durch die Vermeidung bewegter Motoren sowie die geringe Masse der Arme aus Kohlenfaserwerkstoff ermöglichen eine sehr hohe Geschwindigkeit und Beschleunigung bei hoher Wiederholgenauigkeit bezüglich Position und Winkel über den gesamten Arbeitsbereich. Die Bewegung der Kinematik erfolgt über die koordinierte Ansteuerung aller vier Motoren. Das Teach-in der Bewegungsabläufe wird entweder über das Anfahren der Kinematik von Punkt zu Punkt bewerkstelligt oder diese Punkte werden der Steuerung über die Koordinaten offline einprogrammiert. Optional kann die Positionsvorgabe der Kinematik von einem Bildverarbeitungssystem zur Roboterführung unternommen werden. |