AdeptSight Bildverarbeitungssystem zur Roboterführung
|
| Produktfamilien-Verschlagwortung |
|---|
| |
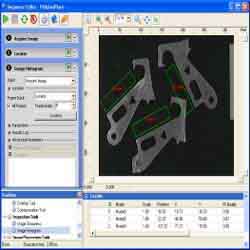
| Funktionsprinzip |
| Der erste Schritt zur Positionsbestimmung mittels Bildverarbeitung ist die Bildaufnahme des beleuchteten Objektes durch die Kamera. Dieses Bild wird anschließend digital zum PC übertragen. Die Auswertung des digitalen Bildes erfolgt im PC. Um z. B. eine Objekterkennung zu realisieren, werden Merkmale aus dem Grauwertbild extrahiert. Diese werden mit Merkmalen zuvor hinterlegter Modelle verglichen. Die modellrelevanten Merkmale werden durch ein "One-Shot-Training" vom AdeptSight Bildverarbeitungssytem beim Einlernen neuer Modelle automatisch ermittelt. Auf Basis des Merkmalsvergleichs zwischen aktueller Bildszene und hinterlegtem Modell wird entschieden, welches Objekt vorhanden ist. Dies funktioniert auch bei sich berührenden oder überlappenden Objekten. Die Position des erkannten Objektes wird in seiner XY-Position und Drehlage ermittelt und dann dem Roboter zur Verfügung gestellt. Die ermittelten Objektpositionen werden aufgrund einer im System integrierten Kalibrierfunktion zwischen Kamera und Roboter in Roboterkoordinaten ermittelt. |