3D-Wellen-Messmaschinen CLM
|
| Produktfamilien-Verschlagwortung |
|---|
| |
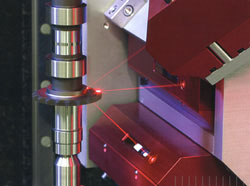
| Funktionsprinzip |
| Die Prüflinge werden manuell oder optional von einem Roboter mit Greifersystem eingelegt und durch lineares Verschieben der Spannspitzen stehend in die Prüfvorrichtung eingespannt. Für einen Prüfzyklus rotiert der Prüfling während der Messung jeweils um 360° und wird von bis zu vier Laser-Triangulationssensoren in verschiedenen Winkeln von -45°, 0° oder 45° abgescannt. Über die Steuerung des Servomotors, der den Prüfling dreht, ist der Drehwinkel des Prüflings bekannt und kann mit einer Winkelauflösung von 0,005° der entsprechenden Stelle der Oberfläche zugeordnet werden. Die Lasersensoren sind auf einem Linearschlitten angebracht und werden nach jeder 360°-Umdrehung des Prüflings Stück für Stück parallel zum Prüfling verfahren, um dessen Oberfläche über die gesamte Länge zu erfassen. Über einen Weggeber wird die Position der Lasersensoren bestimmt. Aus diesen Daten kann die Steuerung einen Datensatz aus dreidimensionalen Koordinaten errechnen, aus dem die eigentlichen Messdaten errechnet werden. |