Entladesystem für Rohteile aus Gitterbox-Paletten
|
| Produktfamilien-Verschlagwortung |
|---|
| |
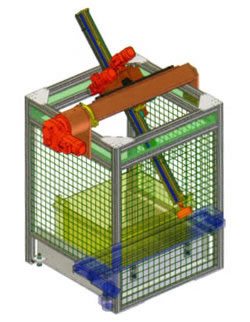
| Funktionsprinzip |
| Zur Entladung wird die gefüllte Gitterboxpalette oder der Behälter mit einem Flurfördermittel in die Station gefördert und gegen einen Anschlag positioniert. Wenn die Schutztüre geschlossen ist, startet der automatische Entladeprozess. Die Entladestation ist prinzipiell als Portalkonstruktion mit dreidimensionaler Beweglichkeit in YXZ-Richtung aufgebaut. Zum Verfahren der vertikalen Greiferachse in X-Richtung dient eine Linearachse mit Zahnriemenantrieb, die um ihre Längsachse schwenkbar gelagert ist. Durch die Schwenkbewegung wird die Greiferachse bis zu einem Winkel von 45° gekippt, was eine Bewegung des Greifers in Y-Richtung erlaubt. Die vertikale Greiferachse hat einen Zahnstangenantrieb und wird zum Entladen nach einem vorprogrammierten Raster über die Grundfläche der Gitterbox verfahren. Das Absenken der Achse erfolgt im Freilauf mit Überwachung durch ein Wegmesssystem, bis der Magnetgreifer auf einem Werkstück auftrifft und stillsteht. Durch das Einschalten hält der Magnetgreifer ein oder mehrere Bauteile fest. Anschließend wird die Achse angehoben, geschwenkt und in der Übergabeposition z. B. über einer Förderstrecke abgesenkt. Dort werden die Bauteile durch Abschalten des Magnetgreifers wieder freigegeben. |