Flexible Zuführung für Kleinstteile anyfeed SXM
|
| Produktfamilien-Verschlagwortung |
|---|
| |
| Funktionsprinzip |
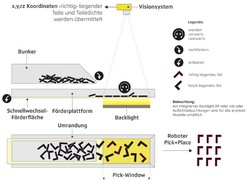
| Das Schwingflächenfördersystem SXM besteht aus einer durchgängigen Schwingförderfläche mit drei Funktionsbereichen. Der erste Bereich ist der integrierte Aufgabebunker, in dem die Bauteile eingefüllt und bevorratet werden. Im zweiten Bereich werden die Bauteile vereinzelt und in den dritten, von der Kamera erfassten Abgreifbereich gefördert. Dabei sind die Teile willkürlich orientiert. Optional kann die Lage der Teile im Abgreifbereich von einem Bildverarbeitungssystem erfasst und ausgewertet werden. Die Positionsdaten und Drehlage der auf der korrekten Seite liegenden Bauteile werden an die Robotersteuerung übermittelt. Auf der falschen Auflagefläche liegende Bauteile werden ignoriert. Anhand dieser Informationen kann der Roboter unabhängig von der Drehlage greifen und dem darauffolgenden Prozess zuführen. Nach dem Abgreifen der richtig liegenden Teile werden die restlichen Bauteile in der Abgreifzone durch eine rasche Vertikalschwingung neu orientiert. Im Folgenden wiederholt sich der Prozess aus Bildaufnahme, Positionsermittlung richtig liegender Teile, Übermittelung an die Robotersteuerung und dem Abgreifen. Fällt die Anzahl der Teile im Abgreifbereich unter ein vorab definiertes Maß, werden durch eine Schwingförderbewegung neue Teile in den Abgreifbereich gefördert. |