Delta-Roboter zur Mikromanipulation PocketDelta
|
| Produktfamilien-Verschlagwortung |
|---|
| |
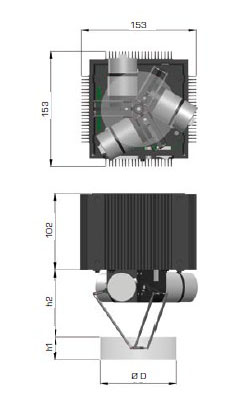
| Funktionsprinzip |
| Die Arme der Kinematik des Delta-Roboters sind in einem hängend montierten Grundrahmen gelagert, in den auch die Antriebsmotoren der Arme sowie die Steuerung integriert sind. Der kürzere Oberarm wird mit einem Servomotor angetrieben, ist schwenkbar und durch Präzisionslager mit zwei parallel geführten Unterarmen verbunden, die mit zwei weiteren Lagern die Greiferplattform tragen. Die horizontale Reichweite im Durchmesser beträgt 100 mm, der Hub 30 mm. Optional können die Motoren der drei Achsen auf einer Drehscheibe angebracht werden. Das Teach-in der Bewegungsabläufe wird entweder über das Anfahren der Kinematik von Punkt zu Punkt bewerkstelligt oder offline über die Koordinaten einprogrammiert. Optional kann die Positionsvorgabe der Kinematik durch ein Bildverarbeitungssystem zur Roboterführung erfolgen. |