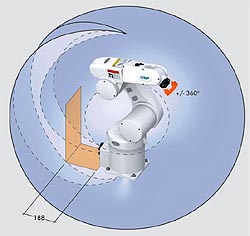
Knickarmroboter Adept Viper s1300/1700D
|
| Produktfamilien-Verschlagwortung |
|---|
| |
| Funktionsprinzip |
| Die Vertikal-Knickarmroboter oder auch Gelenkroboter sind aus beweglichen Gliedern aufgebaut und ähneln in ihrer Beweglichkeit einem menschlichen Arm. Sie verfügen über eine horizontal drehbare Basis und über 5 weitere Gelenkachsen. So kann sich der Roboter in einem großen Arbeitsraum dreidimensional und mit beliebiger Ausrichtung von Greifern und Werkzeugen schnell im Raum bewegen. Das mögliche zeitgleiche Bewegen aller Gelenke erlaubt es, sehr komplexe Bewegungsabläufe auszuführen. Optional können mehrere Roboter mit einer gemeinsamen Steuerung betrieben werden. Vertikal-Knickarmroboter benötigen im Gegensatz zu Portalrobotern wenig Grundfläche und Platz und können in bestimmten Grenzen Hindernisse umgreifen. Die Bewegung der einzelnen Gelenke wird von der Steuerung geregelt und durch hochauflösende Absolut-Encoder überwacht, was eine Wiederholgenauigkeit von bis zu 0,06 mm ermöglicht. Das Teach-in der Bewegungsabläufe wird entweder über das Anfahren des Roboterarmes von Punkt zu Punkt bewerkstelligt oder diese Punkte werden der Steuerung über die Koordinaten offline einprogrammiert. |