Schwenkarmroboter Adept Cobra s Scara Roboter
|
| Produktfamilien-Verschlagwortung |
|---|
| |
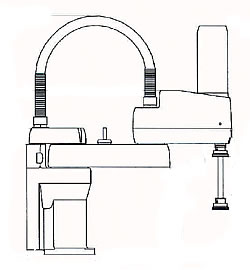
| Funktionsprinzip |
| Roboter des Scara-Kinematikprinzips (Selective Compliance Assembly Robot Arm) bestehen aus 3 vertikalen Drehachsen, einer Linearachse und einem Roboterarm aus zwei Gliedern. Mit der ersten vertikale Drehachse wird die Drehbewegung des Armes um den Roboterfuß realisiert. Über die zweite vertikale Drehachse sind die beiden Glieder des Hebelarmes beweglich miteinander verbunden. Am Ende des Hebelarmes sitzt die Linearachse über die das Greifer in der Z-Achse bewegt werden kann. Mit der vierten Achse wird die Linearachse zur Orientierung des Greifers gedreht. |