Mess- und Sortiermaschine visiSort® - T
|
| Produktfamilien-Verschlagwortung |
|---|
| |
| Funktionsprinzip |
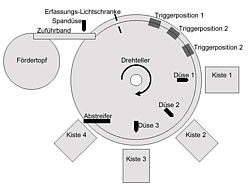
| Über einen Vibrationswendelförderer mit Ordnungseinrichtungen werden die Teile ausgerichtet an ein Vereinzelungsband übergeben. An diesem sitzt eine Lichtschranke, die durch die vorbeigeförderten Teile unterbrochen wird. Aus den Informationen zu Fördergeschwindigkeit und Zeitdauer der Strahlunterbrechung kann eine Aussage über die Teilelänge sowie den Abstand zwischen zwei Teilen gemacht werden. Eine Ausblasdüse entfernt zu lange Teile sowie Werkstücke die nicht den geforderten Mindestabstand aufweisen. Nach dieser groben Vorprüfung werden die Teile an einen Drehteller aus Glas übergeben. Das Vorbeidrehen an einer zweiten Lichtschranke erzeugt das Triggersignal für die Aufnahme. Dieses Signal löst die Beleuchtung und Bildaufnahme der einzelnen Kameras aus. Innerhalb von 60-80ms ist die Aufnahme abgeschlossen. Das erfasste Grauwertbild des Werkstücks aus 256 Grauwertstufen wird anschließend binarisiert. Dabei werden die Bildpunkte für eine grobe Lokalisierung der Werkstückkanten bis zu einem definierbaren Grauwert als weiß und über diesem Grenzwert als schwarz gesetzt. Zur vorläufigen Konturermittlung wird der Schwarz-Weiß-Übergang quer zu einer in dieses Bild gelegten Suchlinie entlang der erwarteten Werkstückkante ermittelt. Mit dieser Positionsinformation zieht das System zur genaueren Kantenbestimmung das ursprüngliche Grauwertebild erneut heran. Ausgehend von der vorläufigen Kantenposition wird der Helligkeitsverlauf über jeweils 8 Pixel zu beiden Seiten ausgewertet. Berechnet wird der Übergang mit der größten Grauwertänderung. Die exakte Zuordnung der Kantenposition erfolgt zu einem 16fach unterteiltem Pixelabstand. Durch diesen Algorithmus wird eine hohe Auflösung der Messung erzielt, die um ein 16faches über der Bildpunktzahl der Kamera liegt. Nach einer Auswertung der erhaltenen Geometrieinformationen und dem Vergleich mit den vorgegebenen Sollwerten erfolgt die Klassifikation der Teile in Gutteile und Fehlertypen. Entsprechend diesem Ergebnis werden die bis zu drei Ausblasdüsen zur Teileabgabe angesteuert. |